
近日,“具身覺醒 智變升維——2025第十二屆高工機器人年會&第六屆高工移動機器人年會”在深圳圓滿落幕。
憑藉輪式機器人小拓在工業場景的落地實踐能力,拓斯達成功斬獲【工業具身全面佈局標杆企業】和【年度產品】兩項大獎。不僅是對“小拓”產品力的認可,更是對拓斯達堅持“從真實場景驅動產品進化”路徑的肯定。




01
以真實場景為牽引
雙路徑加速具身智能落地
在《場景定義產品——拓斯達在具身智能領域的探索與實踐》主題演講中,拓斯達機器人產品線總經理、矩陣智拓CEO黃晶指出,當前機器人行業自動化升級普遍面臨“懂工藝的不懂編程,懂編程的不懂工藝”的難題。
為破解這一能力錯配,拓斯達堅持以真實工業場景的痛點為牽引,推動“AI大模型+機器人”的深度融合,並通過雙路徑加速具身智能場景落地:
路徑一
“垂直工藝小模型+自動化”,優化現有場景
以玩具製造柔性換產為例,玩具產品迭代很快,平均2-4小時換產一次。傳統自動化方案編程週期長,往往“還沒調完編程,人工已完成生產”。
拓斯達推出的AI裝箱工作站,能夠快速完成換產,實現1000+UPH產能,單條產線僅需一人即可管理多個工作站,顯著提升人效和產線柔性。
路徑二
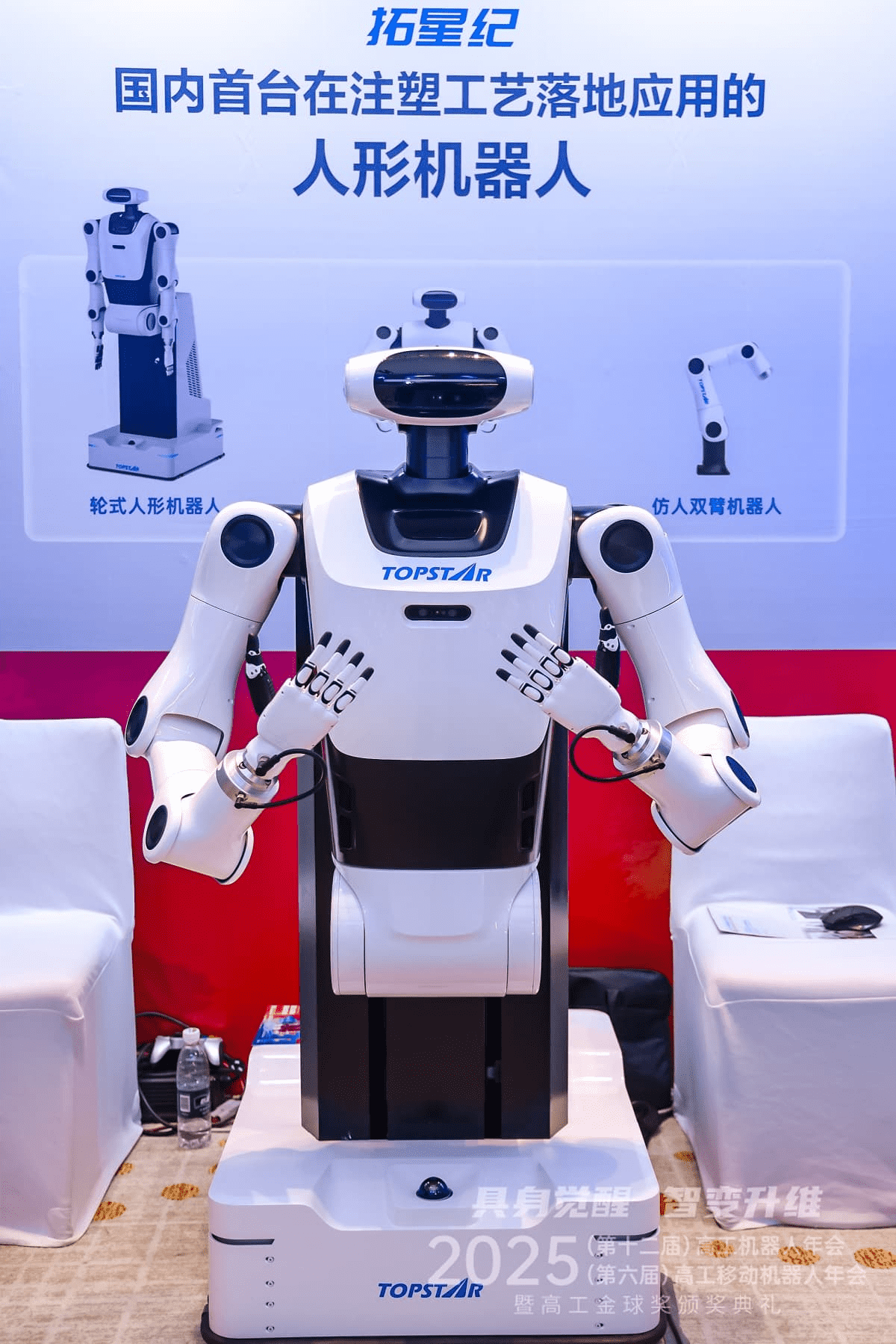
“大模型+人形機器人”,開拓全新應用場景
輪式人形機器人“小拓”憑藉模組化、工業級精度(定位精度0.05mm,額定負載10kg)及深度集成大模型能力,目前已在無人機槳葉分揀、擺盤場景實現全流程自主作業,分揀超1500片/小時,並通過持續數據閉環不斷進化泛化能力。
02
深度參與趨勢對話
聚焦場景痛點與產品升級
在“智能製造的過去式與未來式”主題圓桌對話中,現場嘉賓們圍繞具身智能機器人的形態、特徵與發展路徑展開了深入探討。多位嘉賓強調,具身智能的核心特徵是 “自主化” ,涵蓋自主感知、決策、規劃、執行與學習迭代,其形態應是由場景定義的。
針對具身智能機器人形態,拓斯達副總裁張朋指出,工業落地的核心始終是成本與效率,機器人形態並非越複雜越好,而應由具體應用場景定義。
比如,在絕大多數注塑工藝場景中,作業環境相對平坦規整,無需複雜越障能力。“小拓”採用輪式設計,正是基於對工業場景的深刻理解,在保證靈活移動的同時,大幅提升工作效率和成本效益,真正實現“易用、好用”。
拓斯達將繼續聚焦智能製造核心場景,專注於“AI+機器人”核心技術的研發,深化與生態夥伴的協同,進一步推動具身智能在更多工業領域的探索與規模化應用。
-
 2026-06-12
2026-06-12 -
2026-05-23
-
2026-05-18
-
2026-05-01
-
2026-03-30