
HDC 2025 | 让机器人“会干活”:首个工业双臂具身智能装箱工作站展出
发布日期:2025-06-25
来源:
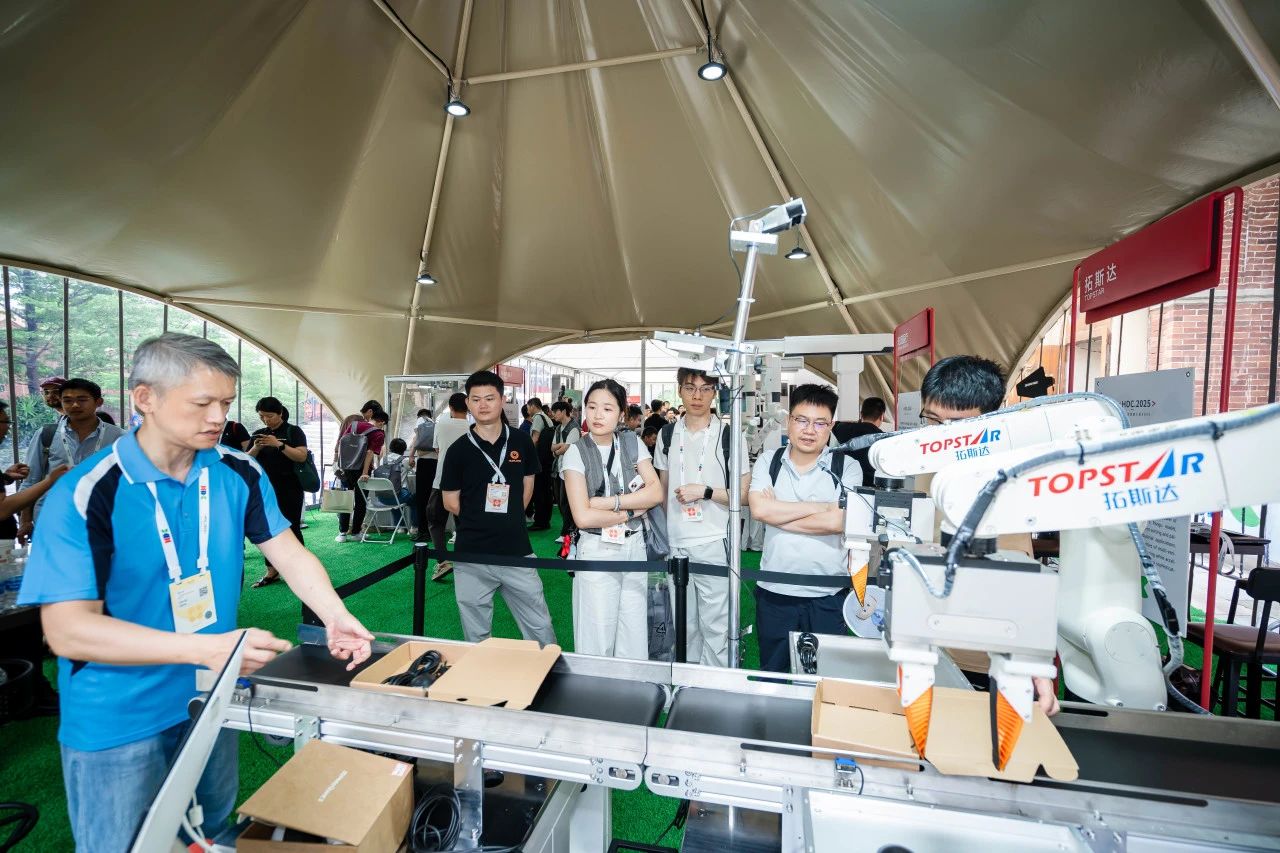
6月20日-22日,华为开发者大会2025(HDC 2025)在东莞松山湖举办,为全球开发者带来一场技术盛宴。

大会现场,拓斯达首次展出基于端到端AI模型的工业双臂具身智能装箱工作站。该工作站依托华为云资源,采用具身智能模型技术与拓斯达新一代X5智能机器人控制平台,通过X5控制平台的RGM(Realtime-Guided-Motion)实时运动控制接口,构建具有500Hz超高控制与响应频率的“感知→决策→执行”工业级闭环系统,加速具身智能机器人在工业场景落地。

该工作站的三大核心技术亮点尤为引人注目。

能“看”东西——感知层智能识别
在感知层,采用具身智能模型,实现物料自主识别功能,无需预编程技能即可适应复杂光照和遮挡环境,显著提升对未知类别物料的泛化识别能力。
会“想”办法——决策层智能规划
在决策层,系统自主生成最优抓取轨迹,并能根据模型预测控制实时响应物料位姿变化、输送带速度波动等工况,动态优化作业策略以确保效率最大化。
动作精准灵活——执行层智能控制
在执行层,依托新一代X5智能机器人控制平台的高精度实时控制接口,解决行业普遍存在的响应延迟、控制偏差和接口适配的难题。双臂协调控制算法确保两台机械臂像人的双手一样配合进行无碰撞作业,满足工业级作业的精准度与灵活性需求。
目前,首批工作站进行验证。拓斯达也将持续探索ICT与OT技术的深入融合,让机器人从“能干活”到“会干活”,从而推动制造业向更高效、更柔性的方向迈进。
推荐资讯
-
 2026-06-12
2026-06-12 -
2026-05-23
-
2026-05-18
-
2026-05-01
-
2026-03-30